Lading
Enkel USB-Lader:

- Plugg først batteriet i laderen. Lyset på laderen vil da tennes.
- Plugg deretter laderen i USB-uttak (gjerne mobillader eller batteribank)
- Lyset slukker når den er ferdig ladet etter 1-2 timer.
Forberedelser
- Monter batteriet under festebåndet på undersiden, slik at det er plasert mest mulig på midten.
- Skru på senderen (håndkontroll eller lignende)
- Koble til batteriet på den hvite pluggen under dronen
- Vent på tre raske pip rett etter hverandre før dronen er klar
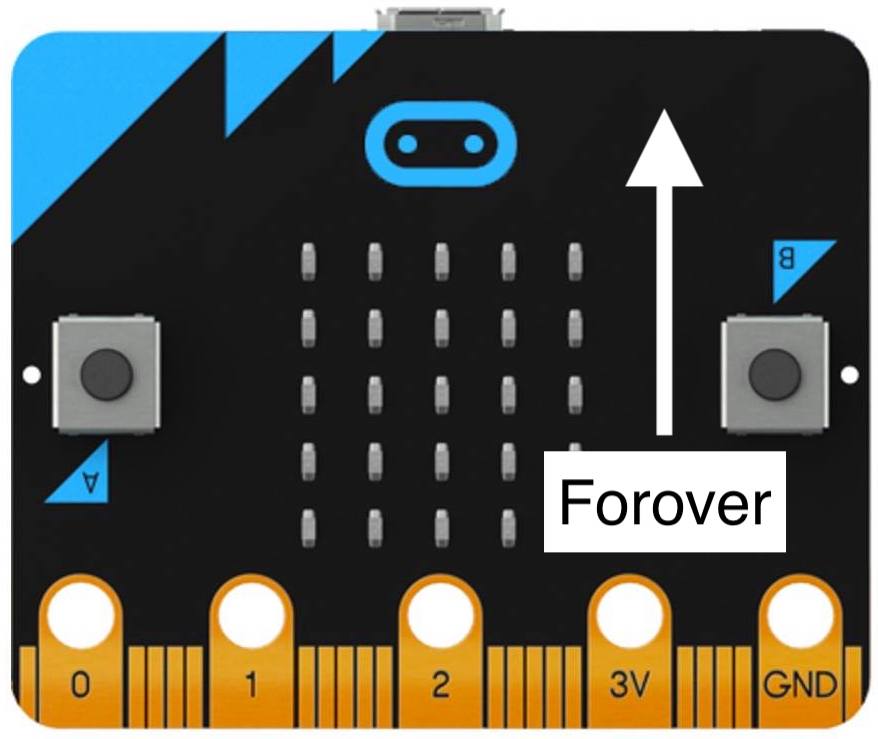
- Plasser dronen med "nesa" samme vei som deg selv (se illustrasjon lenger ned)
- Forover tilsvarer "vanlig" leseretning på microbit. I tillegg vil normalt hvite propeller indikere forover, mens sorte propeller vil være bakerst.
Flyving
- Aktivér dronen (armering) ved å klikke på A og B samtidig på håndkontrollen. Propellene starter å spinne forsiktig. Du vil se at farten påvirkes av håndkontrollens bevegelser
- Klikk på B et par ganger til dronen starter å klatre forsiktig
- Klikk på A for redusere den kollektive farten på motorene
- Finn punktet der dronen akkurat har nok throttle til å holde seg noen lunde i samme høyde. Deretter øker og senker du farten med A og B etter hva som passer.
- Endre fjernkontrollens vinkel for å endre dronens vinkel. Vri kontrollen den veien du vil dronen skal fly.
- For å lande, klikk på A til dronen er nede på bakken Klikk så på A + B for å skru av motorene igjen.
- Nødlanding: Mister du kontrollen over dronen, kan du riste på kontrollen (shake) for å stope motorene.


Plasser deg samme vei som micro:bit for best mulig kontroll under flyving.
Fjernkontroll / display

Variabler
De viktigste variablene i håndkontrollen er:

Forover og bakover. Vi henter ut input.rotation(Rotation.Pitch) fra accelerometeret, som gir oss vinkelen.
- 0 grader er nøytralt når kontrollen ligger vannrett
- Fra -1 til -45 flyr dronen bakover
- fra 1 til 45 flyr dronen forover

Nesten det samme som Pitch, bare at her er retningen høyre og venstre.
- Positiv vinkel tar dronen til høyre,
- Negativ vinkel tar den til venstre.

Dette får dronen til å rotere sidelengs til høyre eller venstre. Høyt tall roterer fortere. Maksimalverdier er -90 til 90. 0 betyr ingen rotasjon. For å bruke Yaw legger du tommelen mellom P0 og P1 for å rotere mot venstre, og mellom P1 og P2 for å rotere mot høyre. En svak, ufarlig strøm på 3 volt ledes gjennom huden fra pin 1 og måles i P0 og P2.
Throttle

Felles motorkraft på alle motorene - øker eller minker høyden. Oppgitt i prosent.
- Når verdien er 0%, og arm er satt til 1, går motorene på tomgang og dronen blir på bakken.
- For å klatre må throttle være over et gitt punkt, som ligger rundt 50-60%
- Mellom 0 og ca 50 vil dronen senkes eller holde seg på bakken
- Omkring 50 vil dronen holde seg i jevn høyde
- 100 er maks fart.

Arm (armering), eller aktivering, er en sikkerhetssperre som normalt er satt til 0. For at dronen skal fly, må denne verdien være 1.

Flymodus: Denne skal være satt til 1 som standard.
- 0: Acro mode, dronen kan loope (eksperimentell, utestet, anbefales ikke på dette tidspunkt)
- 1: Stabilise mode (standard, dronen stabiliserer seg selv vannrett)
- 2: Navigation mode (selvnavigering) Funksjonalitet er planlagt
- 3: Calibration mode: Nyttig funksjon som kalibrerer dronens accelerometer.
![]()
Sett denne verdien til 1 for å lage en pipelyd fra dronens buzzer (høyttaler).
Husk å sette den tilbake til 0 igjen så den ikke piper konstant. Buzzeren brukes nemlig til å varsle om tomt batteri på dronen.
