Lading
Du lader batteriet med den hvite, brede pluggen som plugges i den medfølgende laderen. Når lysene skifter til grønt er den ferdig ladet.
Forberedelser
- Monter batteriet under festebåndet på undersiden, slik at det er mest mulig symmetrisk.
- Skru på senderen (håndkontroll eller lignende)
- Koble til batteriet med på røde pluggen under dronen
- Plasser dronen med "nesa" samme vei som deg selv (se illustrasjon)
- Forover tilsvarer "vanlig" leseretning på microbit. I tillegg vil normalt hvite propeller indikere forover, mens sorte propeller vil være bakerst.
Flyving
- Aktivér dronen (armering) ved å klikke på A og B samtidig på håndkontrollen. Propellene starter å spinne forsiktig, påvirket av håndkontrollens bevegelser
- Klikk på B for å øke høyden med 25 cm
- Klikk på A for å senke høyden med 25 cm
- Endre fjernkontrollens vinkel for å endre dronens vinkel. Vri kontrollen den veien du vil dronen skal fly.
- Maks høyde er satt til 2,5 meter, men dette kan du selv programmere om i håndkontrollen.
- Dronen bruker et barometer for å oppnå ønsket høyde. Høyden kan variere noe, men dette vil bli bedre i fremtidige oppdateringer.
- Ved fare for kræsj kan du riste på håndkontrollen. Høyden settes da til 0 og dronen nødlander.
- For å lande, klikk på A til dronen er nede på bakken Klikk så på A + B for å skru av motorene igjen.


Plasser deg samme vei som micro:bit for best mulig kontroll under flyving.
Fjernkontroll / display

Variabler
De viktigste variablene i håndkontrollen er:

Forover og bakover. Vi henter ut input.rotation(Rotation.Pitch) fra accelerometeret, som gir oss vinkelen. 0 grader er nøytralt når kontrollen ligger flatt på et bord. Vi kan ha både positive og negative vinkler. Positive vinkler f.eks +23º tar dronen forover mens negative vinkler, f.eks -17º gjør at dronen flyr bakover.

Nesten det samme som Pitch, bare at her er retningen høyre og venstre.

Dette får dronen til å rotere sidelengs til høyre eller venstre. Høyt tall roterer fortere. Maksimalverdier er -90 til 90. 0 betyr ingen rotasjon. For å bruke Yaw legger du tommelen mellom 2 og +3V og tilter kontrollen til siden.

Ønsket høyde vi vil at dronen skal ha, i centimeter.

Arm (armering), eller aktivering, er en sikkerhetssperre som normalt er satt til 0. For at dronen skal fly, må denne verdien være 1 eller høyere.

Flymodus: Denne skal være satt til 1 som standard. Flymodus kan komme til å bli erstattet av annen og enklere funksjonalitet.
- 0: Acro mode, dronen kan loope (eksperimentell, utestet, anbefales ikke på dette tidspunkt)
- 1: Stabilise mode (standard, dronen stabiliserer seg selv vannrett)
- 2: Navigation mode (selvnavigering) Denne blir sannsynligvis endret
- 3: Calibration mode: Nyttig funksjon som kalibrerer dronens accelerometer. Denne funksjonen vil sannsynligvis bli flyttet slik at den aktiveres fra dronen istedenfor fjernkontrollen.
Slik endrer du flymodus: Klikk på A til det kommer en bokstav. Tilt micro:biten til en side for å endre bokstav. Klikk på B for å aktivere den nye modusen.
![]()
Sett denne verdien til 1 for å lage en pipelyd fra dronens buzzer (høyttaler).
Husk å sette den tilbake til 0 igjen så den ikke piper konstant. Buzzeren brukes nemlig til å varsle om tomt batteri på dronen.
![]()
Avstand til nærmeste hindring i centimeter, målt fra sonaret på dronen. Avstander opp til 4 meter kan måles.

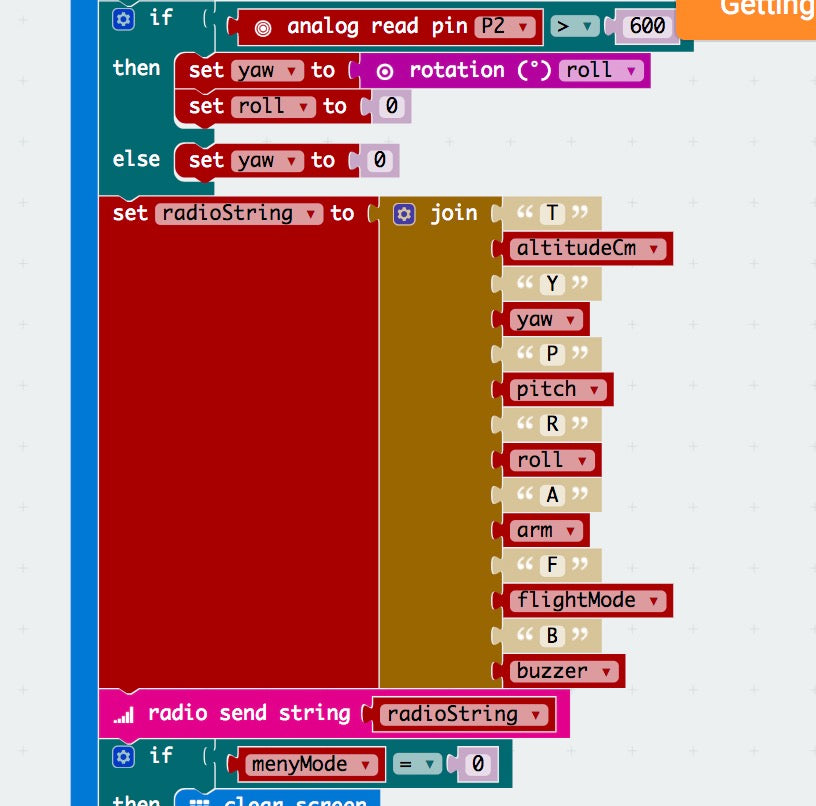
Dette er en tekststreng som inneholder all styringsinformasjon fra fjernkontroll til drone. Man setter sammen de ulike verdiene ved hjelp av join-funksjonen. En av følgende bokstaver skal kombineres med den gitte verdien. T(throttle/høyde), Y(yaw), P(pitch), R(roll), A(arm), F(flymodus), B(buzzer).

