We had this crazy idea at the University of Oslo... What if we just took a bunch of large RC motors, hooked them in hubs, got some powerful ESC´s and a flight controller. Could it be powerful enough to transport a human being safely?

Technical drawings. Thanks to Nodin innovations for design help.
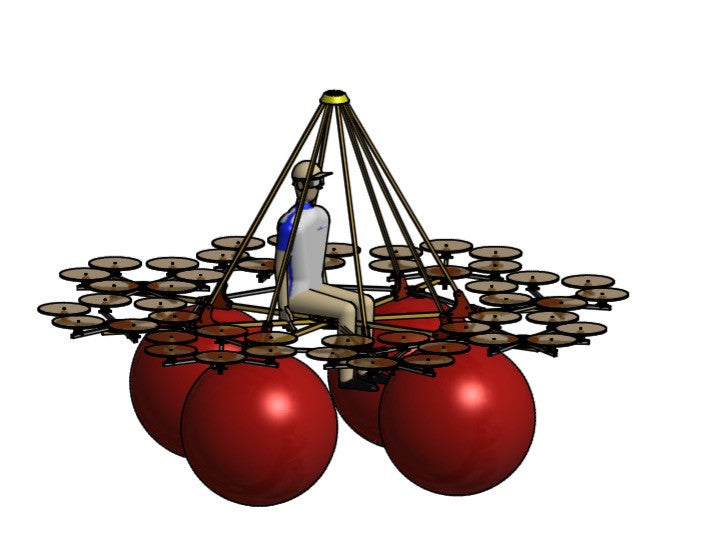
We started with looking at various motors. Big propellers are scary so we decided to keep the size down as much as we could. We estimated some 170 kilograms of lifting force would be needed in total (EU regulations are now limiting us to 150). After playing around with numbers, we ended up with some affordable 4260–700KV motors from a chinese factory. They spin 13 inch props up to 1500 watts at 70 amps (6 cell). This gives each motor a thrust corresponding to 3.6 kilograms. We orderer 48 and some extra for backup. For the ESCs we used Mystery 80 A (opto). They have active breaking by default and voltage- and temperature protection, meaning they will reduce throttle when needed. The frame was made of hollow, square aluminium rods, 15x15 mm and 20x25 mm mostly. We made eight hexacopters with a center of 6 or 8mm plywood and mounted them to the main frame. The bumbers were made of simple pilates balls and cargo nets to hold them.

For the main controller we were planning on using the APM, but after some thought, we decided for simplicity, the hassle-free KK2 board. It´s made by our fellow Norwegian mr. Rolf Bakke. It´s loaded with Steveis 1.9 firmware and has the self-level set to "always" :) Sorry no acro at this point ;) The setup is Octocopter X, and P gain is slightly increased on pitch and roll. The roll and pitch is pretty powerful so we had to reduce the stick scaling all the way down to 15. We use the Taranis X9D and have a powerful BEC with its own battery to drive the KK2 and the Taranis receiver. The following picture shows the first test setup. It was pretty easy to calibrate the ESC´s, as all 48 could be configured at the same time using the throttle pass trough on the KK2 board.

For power we are using 24 Gens Ace 6S 5000 mAh 45 C. They have to deliver up to 140 amps each as they have to drive two motors. That means up to 28 C... All batteries have a lipo alarm set to 3.5 volts, as soon as the first starts to beep, we know it´s time to land. At this point there are about 20–30% left in the battery.
For safety measures, the passenger is supposed to sit inside a solid cage design, and has to wear protective suit and a helmet. There is a panic button on board that will cut the signal to the ESC´s, and we also have an external kill switch, operated by second Taranis remote. The ESCs have active breaking and they are programmed by default to cut throttle after about 3 seconds of lost signal. The vehicle has an RPAS safety manual and is now legal to fly! Unfortunately, this permit is also limiting us to lift no more that 74 kilos and the permit doesn´t allow a person on board.
To lift a person we have to find a way around the rules, either with a rope tied to the ground, by flying indoor, or by moving the flight to a less strict country. Hopefully we will be able to do it this year.
So what´s it like to fly this monster? I have to tell you it´s surpricingly close to a small octocopter. It climbs slowly but the roll and pitch is super quick and doesn´t feely much different than a 450 sized quad. Our only issue is the yaw compensation, as this requires any other hub to spin faster. At this point we are not trying to fight it as this is a very slow rotation. We are actually considering leaving the yaw completely out of the mix, and adding some v-tail or sideways propellers instead.

Part of the team from Rotorklubben (drone group in Oslo) and students from the University of Oslo.
